I try the code like this:
plot(m,which="fit",marg=FALSE,var.time="Time",bty="n")
The plot looks like following:
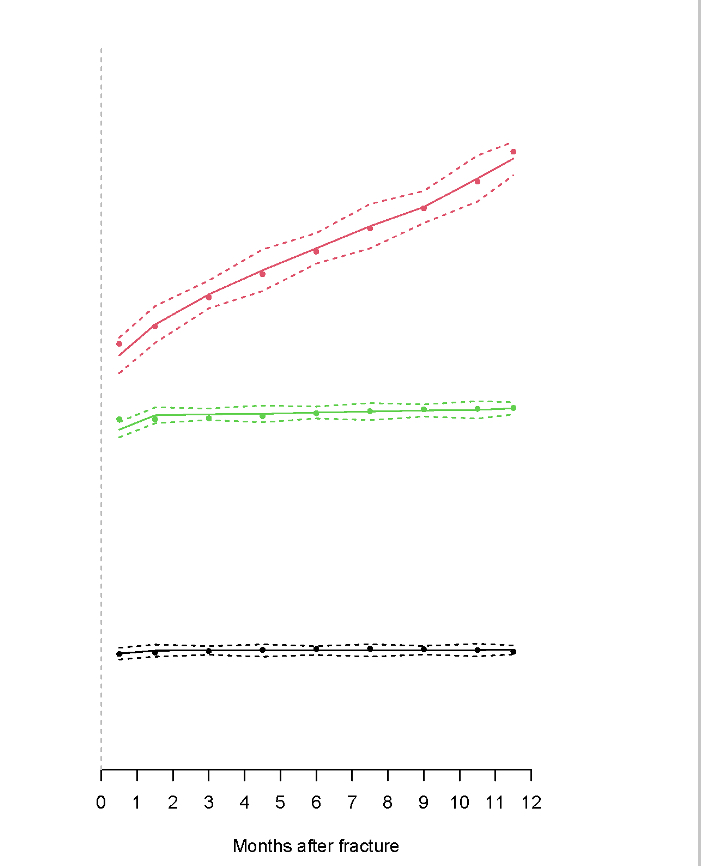
It was not starting from 0.
I try the code like this:
plot(m,which="fit",marg=FALSE,var.time="Time",bty="n")
The plot looks like following:
It was not starting from 0.
This topic was automatically closed 90 days after the last reply. New replies are no longer allowed.
If you have a query related to it or one of the replies, start a new topic and refer back with a link.